
micro:bit 板载蓝牙,加速度计,电子罗盘,5*5 LED 点阵等传感器,还可以通过 GPIO 来控制其他的传感器,或者从传感器上读取数据,但是如果要使用 micro:bit 来驱动一个小车,就需要加入电机驱动板,在这个项目中,我们使用双 H 桥电机驱动板和 Micro:bit 控制器结合,来控制 2WD 移动平台的基本运动,实现移动平台的前进、后退、左转、右转及停止,同时在 micro:bit 的点阵上显示小车的行进方向。我们将给出 JavaScript Blocks Editor 和 microPython 两种语言编写的控制代码。
一、使用硬件
1、2WD 移动平台(电机版) * 1
2、micro:bit 控制器 * 1
3、micro:bit 扩展板 * 1
4、双 H 桥电机驱动板 * 1
5、7.4V 锂电池 * 1
6、电源开关 * 1
7、实验连接线若干
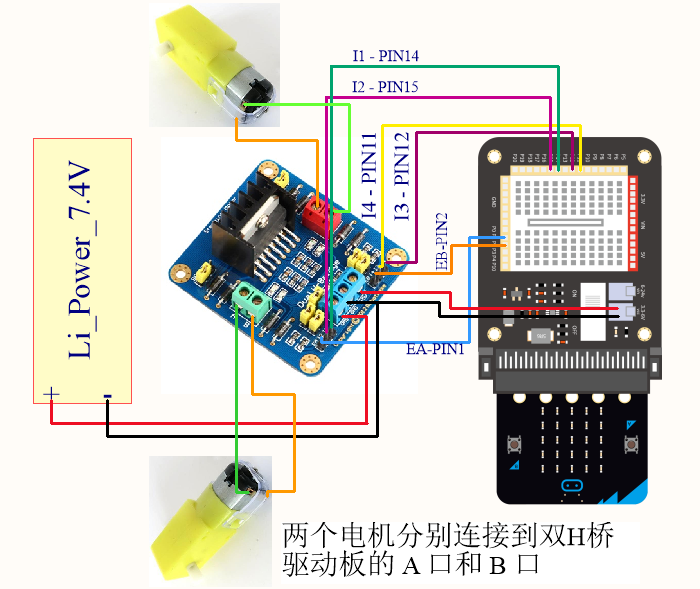
二、硬件连接
三、代码编写
1、JavaScript Blocks Editor

2、microPython
from microbit import *
speed = 180
def forword():
q = Image( "00900:"
"09990:"
"90909:"
"00900:"
"00900")
display.show(q)
pin1.write_analog(speed)
pin2.write_analog(speed)
pin11.write_digital(0)
pin12.write_digital(1)
pin14.write_digital(0)
pin15.write_digital(1)
def back():
h = Image( "00900:"
"00900:"
"90909:"
"09990:"
"00900")
display.show(h)
pin1.write_analog(speed)
pin2.write_analog(speed)
pin11.write_digital(1)
pin12.write_digital(0)
pin14.write_digital(1)
pin15.write_digital(0)
def left():
z = Image( "00900:"
"09000:"
"99999:"
"09000:"
"00900")
display.show(z)
pin1.write_analog(speed)
pin2.write_analog(speed)
pin11.write_digital(0)
pin12.write_digital(1)
pin14.write_digital(1)
pin15.write_digital(0)
def right():
y = Image( "00900:"
"00090:"
"99999:"
"00090:"
"00900")
display.show(y)
pin1.write_analog(speed)
pin2.write_analog(speed)
pin11.write_digital(1)
pin12.write_digital(0)
pin14.write_digital(0)
pin15.write_digital(1)
def stop():
s = Image( "00000:"
"00000:"
"99999:"
"00000:"
"00000")
display.show(s)
pin1.write_analog(speed)
pin2.write_analog(speed)
pin11.write_digital(0)
pin12.write_digital(0)
pin14.write_digital(0)
pin15.write_digital(0)
while True:
forword()
sleep(1000)
stop()
sleep(1000)
back()
sleep(1000)
stop()
sleep(1000)
left()
sleep(1000)
stop()
sleep(1000)
right()
sleep(1000)
stop()
sleep(1000)
将上面的代码复制到 mu 编译器中,连接 micro:bit 和电脑,然后单击 Flash,烧录代码,小车会开始运动,同时点阵显示当前的运动方向。
四、实验总结
这个项目仅对移动平台进行了基本控制,没有加入其他的传感器,我们可以在这个基础上进行扩展,例如加入寻线传感器或避障传感器来制作一款智能移动平台,同样你也可以使用 micro:bit 板载的功能,让小车变得更加智能。
----------------------------------------------------------------------------------------------------------------
奥松机器人官网:www.robotbase.cn
微信号:搜索公众号“奥松机器人”
QQ群: 271230889(讨论,解惑)
微博:@奥松机器人基地
----------------------------------------------------------------------------------------------------------------
温馨提示:予人玫瑰,手留余香;如果你喜欢这篇文章,不妨转发推荐给你身边的朋友!
近期新闻
热门新闻

奥松智能微信










