
哈喽,同学们好,之前我们通过学习学会了利用超声波传感器实现自动避障的功能!今天我们继续学习智能跟随,实现扫地机器人的基本功能!、
学习详情
01
本期学习目标
1、探究超声波传感器的更多功能
2、学习变量和随机模块
3、利用程序实现智能跟随和自动扫地的功能
4、培养学员的逻辑思维能力
5、掌握【情境控制模块】的【魔术手】功能使用
02
学习新知
分析如何用超声波传感进行自动跟随操作!
还记得超声波传感器的功能吗? 当检测到指定距离范围内前方障碍物时,超声波传感器就能传递出电信号,告诉主控器“ 检测到障碍物啦 ”!
那我们尝试转换思路:CooCoo躲避障碍物的时候,是检测到指定距离范围的障碍物时停止或是转向;那能否变换成“当CooCoo检测到指定距离的障碍物时,就开始跟随障碍物移动”呢?
同样是利用的超声波的检测功能,在不同的场景下,可以实现不一样的目的。
这就会用到我们APP里【情境控制模式】下的【魔术手】功能。
03
本期需要的设备和材料
1、CooCoo智能编程机器人(礼品版或教育版)一套
2、手机/平板电脑 一台
3、纸盒等障碍物若干
04
情景模式

打开APP中【情境控制模式】,选择魔术手功能


利用超声波传感器检测,使CooCoo机器人始终跟随手掌运动!


-魔术手控制效果展示-
05
牛刀小试-编程模块探究
如何利用编程实现智能跟随呢?首先编程开始前,需要同学们了解几个编程块!
1. 数学编程块-变量。
(1) 新生成一个变量;

变量(Variable)来源于数学,是计算机语言中能储存计算结果或能表示值抽象概念。变量可以通过变量名访问。在一些比较长的程序中,当检测到的数据值在不断变化时,就可以使用变量来实时调用数据的最新值,保证程序功能的正常使用。
在指令式语言中,变量通常是可变的。
(2) 将变量按照一定规律更改;

比如编程块后面和数字2结合,即表示每运行一次程序就将变量增加2。
(3) 将变量直接设置为一个值。

随机数(random number)是专门的随机试验的结果,随机数最重要的特性是:它所产生的后面的那个数与前面的那个数毫无关系。
了解完各编程块的含义,让我们通过程序实现魔术手的功能,即当CooCoo检测到小于等于25cm时后退,大于25cm时前进。
参考程序

06
学习进阶
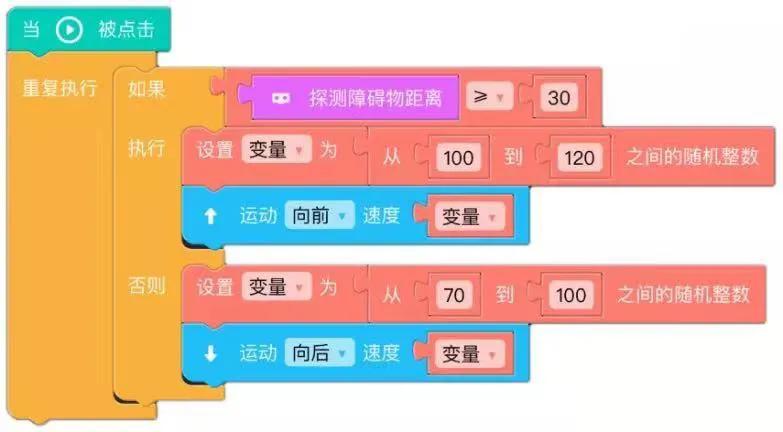
上一个任务成功完成后,让我们继续下一个任务:当CooCoo检测到大于等于30cm时,以100-120之间的随机功率前进;否则以70-100之间的随机功率后退。同学们可自己动手尝试操作哦!
参考程序
7
学习扩展
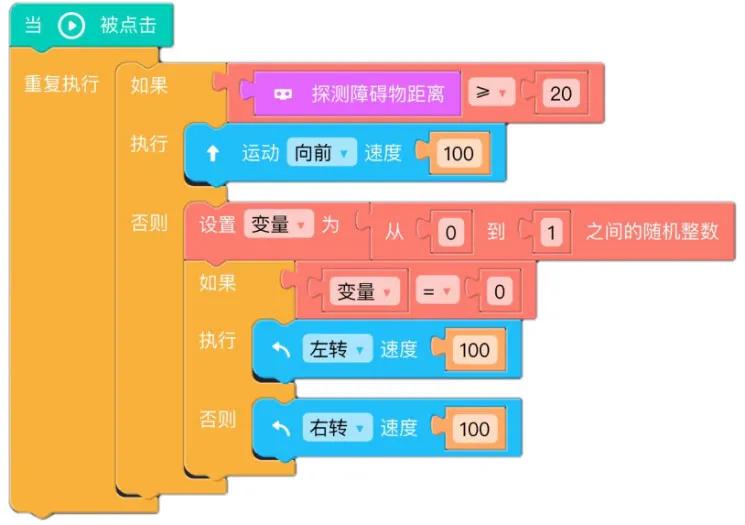
现在就让我们开始利用学习的原理实现扫地机器人功能吧!CooCoo当无障碍时前进,当前方20cm遇到障碍的时候,CooCoo随机左转或者右转躲避障碍。同学们快快动手操作起来吧~
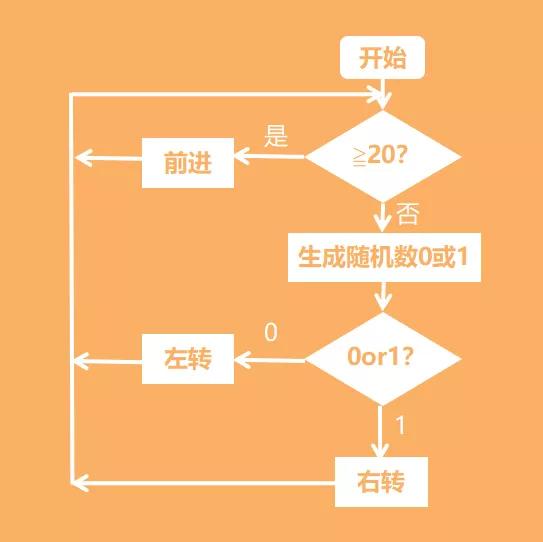
参考程序
今天的课程到此就结束啦,轻松的半个小时,是不是觉得生活中的扫地机器人也没那么神奇啦!当你把AI技术都学会,未来总有一天也会发明各种各样的小电器,成为一名创客家让我们一起期待下节课的学习吧!!
各大公立校、托管和教培机构,若想获得更详细课程方案可以在下方联系我们。 教案、课件和大量视频素材都已齐备! 让我们一起努力培养未来时代的科创家吧!
CooCoo智能编程机器人课程概况


想要索取教育整体解决方案
可直接电话或扫码咨询
400-619-0998转3 
近期新闻
热门新闻

奥松智能微信










