
现今,我们收到的快递50%都有机器人来参与分拣运输,在医院里挂号开药,70%都会有机器人帮您来处理;机器人已经渗透到了我们生活的方方面面。有些机器人能够自主沿着清晰的路线前进,在工厂、医院和设施中的许多自动导引运输车(AGV)可以沿着嵌入地板中的电线形成的路线行进。今天就让我们深入的来学习机器人的智能寻线功能!

学习详情
01
本期学习目标
(1)熟练掌握【情境控制模块】的【自动巡线】功能;
(2)理解双路巡线传感器检测黑线的工作原理;
(3)能用【编程模式】中的【感知】【控制】【运动】等功能模块区综合完成本节课中的程序任务;
(4)通过学习锻炼同学们的逻辑思维能力;
02
学习新知
在CooCoo前方万向轮的下方,两端带有黑色检测头的这个电子元件就是双路巡线传感器。

巡线传感器是利用专为机器人的巡线功能设计,机器人能够沿着白色背景上的黑色线条移动,或者是黑色背景上的白色线条移动,具有反应灵敏,适应图形化编程等优点。
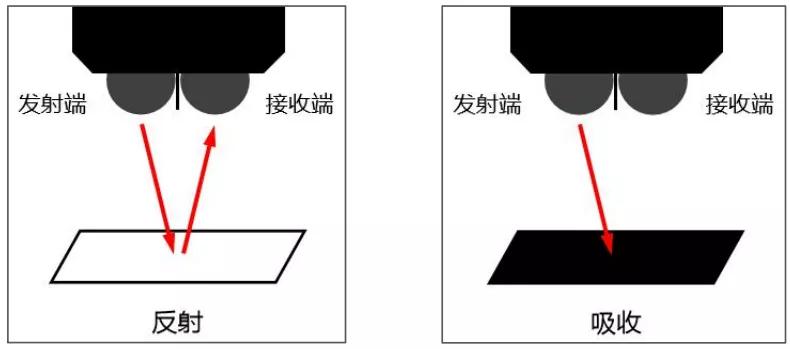
传感器的工作原理是:在巡线传感器的检测头上有一个红外发射管和一个红外接收管,当地面为 白色,白色界面能反射所有红外光,反射回来的红外光被接收管接收,主控器从而判断反射面是高亮 度、无法穿透的白色界面;当地面为黑色,由于黑色能吸收红外线,几乎没有被反射回来的红外光, 所以接受管不会导通,主控器从而判断反射面是深色、能吸收红外线的黑色界面。
03
本期需要的设备和材料
1、CooCoo 编程机器人一台(教育版/礼品版)
2、巡线地图
3、平板一台
04
情景控制模式
我们先学习情景控制模式,打开APP中【情境控制模式】进入【自动寻线】!


从左到右分别是小车运动进度、巡线传感器指示灯 、开始/结束按钮,当巡线传感器检测到黑线时,我们还可以通过巡线传感器指示灯查看到具体是哪侧的传感器检测到了黑线。

将CooCoo放在地图上,就可以沿着黑线运行啦!

05
牛刀小试-编程模块探究
接下来让我们进行编程的方式实现巡线功能!
下面这个模块是控制双路巡线传感器的编程模块

图中第1种情况:两侧巡线检测头均在白线上;
第2种情况:左侧巡线检测头在白线上,右侧巡线检测头在黑线上;
第3种情况:右侧巡线检测头在白线上,左侧巡线检测头在黑线上;
第4种情况:两侧巡线检测头均在黑线上。
【巡线模块】需要与条件判断语句一起结合使用。

接下来让我们进行第一个学习任务:用主控板上的LED灯指示检测头检测到黑线方向。
参考程序

06
学习进阶
继续让我们完成下个任务,根据双路巡线传感器检测到的四种情况,让CooCoo实现不同的行动。
两侧检测头都检测到黑线,CooCoo前进;两侧检测头都检测到白线,CooCoo停止运动。只有右侧的检测头检测到黑线,说明CooCoo偏向于黑线的左侧,CooCoo需要稍微右转;只有左侧的检测头检测到黑线,说明CooCoo偏向于黑线的右侧,CooCoo需要稍微左转。
参考程序

08
扩展学习
通过上面的学习我们继续尝试将巡线传感器与超声波避障传感器综合起来,边进行障碍物检测,边进行巡线检测。
参考程序

今天的课程到此就结束啦,同学们应该已经学会了通过上面的方式实现自动巡线功能,从而达到了自动驾驶的功能!基于这节课所学知识,同学们还可发挥自己的创意,设计更有趣的程序哦!有好想法的同学可以随时跟老师交流!也可以随时在下面留言哦~
各大公立校、托管和教培机构,若想获得更详细课程方案可以在下方联系我们。教案、课件和大量视频素材都已齐备!让我们一起努力培养未来时代的科创家吧!
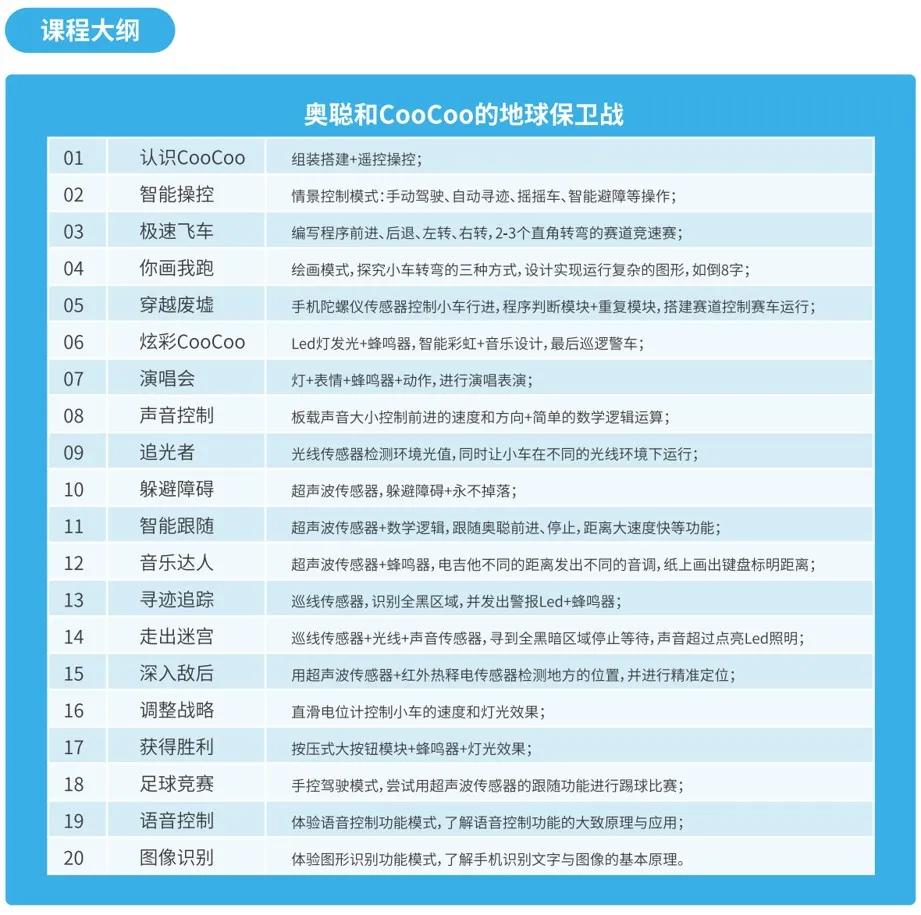
CooCoo智能编程机器人课程概况
样课动漫课件部分展示
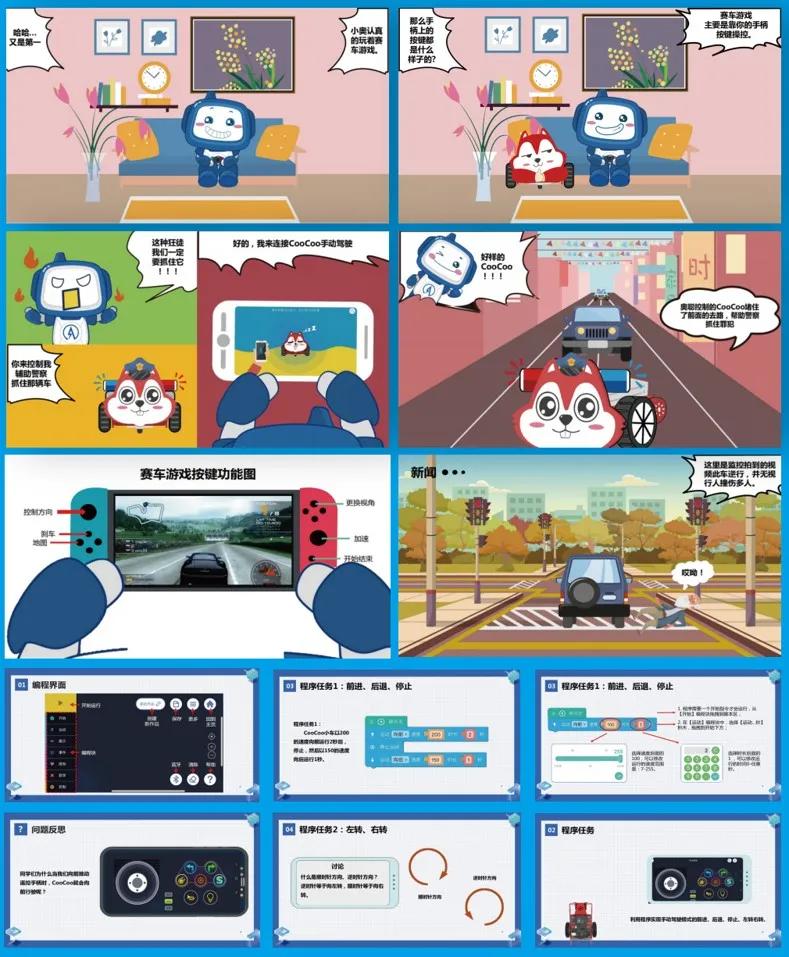
样课教案部分展示
学生用书教材展示

想要索取教育整体解决方案
可直接电话或扫码咨询
400-619-0998转3 
近期新闻
热门新闻

奥松智能微信










