
迷宫,相信大家都玩过,让人眼花缭乱的路口总是那么让人纠结,到最后总是无路可走,那么如何才能快速走出迷宫呢?今天就让CooCoo带你快速的穿越迷宫吧!!

在本课学习前快来看看奥聪和CooCoo今天发生了什么有趣的故事吧!
-奥聪与CooCoo的地球保卫战-走出迷宫-
学习详情
01
本期学习目标
(1)复习双路巡线传感器的工作原理和使用方法;
(2)复习光线传感器与声音传感器的功能原理和使用方法;
(3)探究走迷宫的方法,完成本节课的走迷宫探究任务;
(4)培养同学们的逻辑思维能力;
02
新知复习
上节课我们学习了CooCoo自动巡线功能,为什么CooCoo可以精确得沿着黑线行走呢?

答案是因为在CooCoo运行前我们对它进行了准确的分析,CooCoo在黑线运行时,如果左右两侧得巡线传感器都检测到黑线时,CooCoo就在行走的区域内,执行即可,如果左侧检测到白线右侧检测到黑线时,CooCoo就会右转,反之则左转,通过这种方式CooCoo就永远不会偏离黑线了,从而达到自动巡线的功能。


-小车巡线参考程序-
03
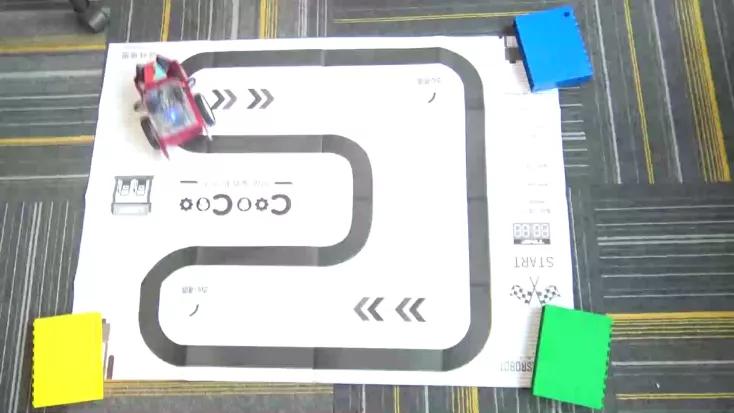
本期需要的设备和材料
1、CooCoo编程机器人一台(礼品版/教育版)
2、模拟搭建迷宫的道具(积木等)
3、黑色不导电胶带
4、平板一台
04
知识点测试
接下来同学们找一处空地上用黑色胶带贴出一条黑线,然后可以进行编程,实现CooCoo顺利沿着黑线行走。参考路线:
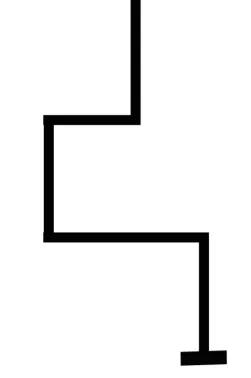
CooCoo走完这个黑线的程序有多种不同的方式,先给同学们提供两种方式:
1、主要利用速度与时间的合适配比来走完黑线:

注意:这里【运动】模块上的速度与时间需要根据实际黑线的长度来确定。
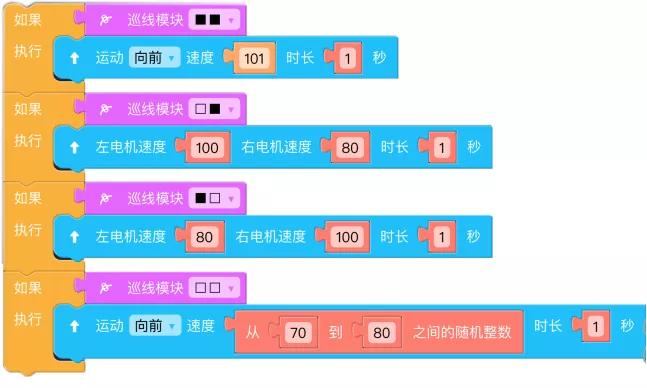
2、利用双路巡线传感器的检测作用:
情况1:如果黑线的宽度比CooCoo小车上双路巡线传感器的距离小,那么考虑无论哪侧传感器检测到黑线,都可以让小车直行即可。只有当两侧传感器都无法检测到黑线的情况下,小车左转或是右转。

情况2:如果黑线的宽度比CooCoo小车上双路巡线传感器的距离大,那么只有当双路巡线传感器的两个探测头都在黑线上时,小车才直行;如果两个探测头都在白底上时,小车停车,否则小车左转或是右转。

05
牛刀小试-编程模块探究
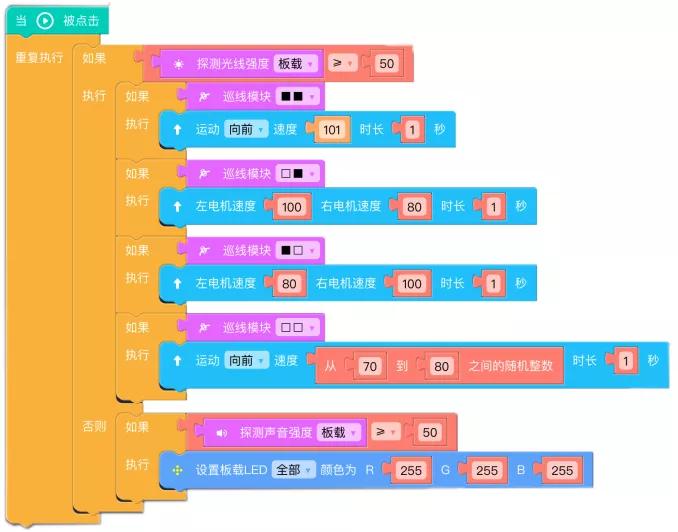
接下来我们加入光线和声音的判断,让CooCoo巡线时,更加智能化!
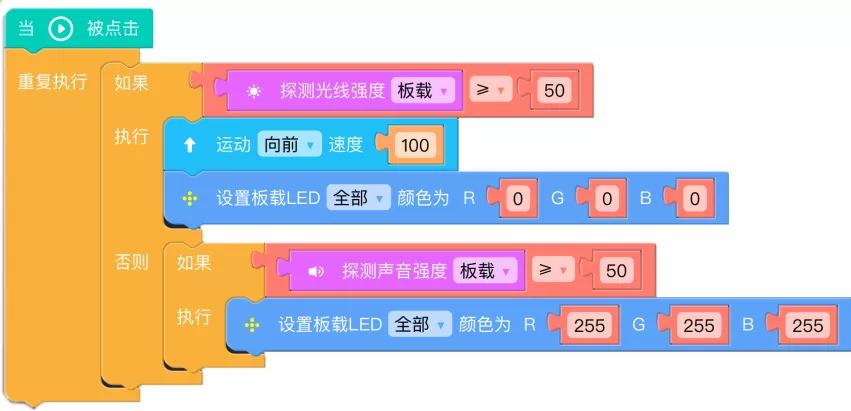
参考程序
第1步:测试环境光线的大小。
如果环境光值较大,小车主控板上的灯不亮,小车可以直行;反之如果光值较小,小车主控板上的灯亮起,照亮环境。
第2步:加上小车的巡线作用。
这部分程序与上节课中的程序相同,可以直接替换。
第3步:综合光线检测与声音检测的作用,让小车只能在光线作用下巡线。
视频参考教程
06
学习进阶
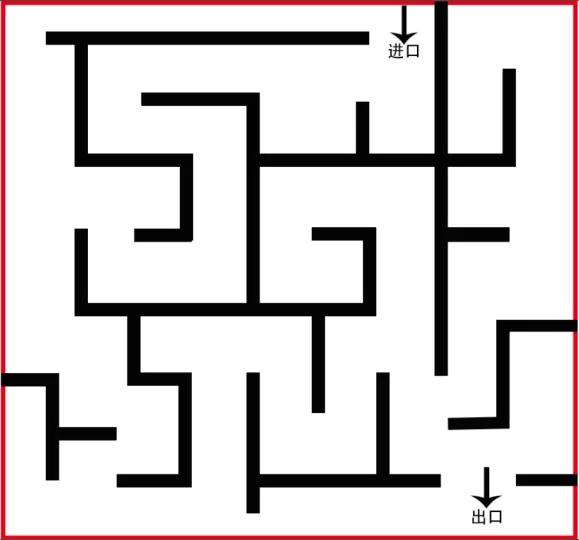
继续让我们深入学习,如何用超声波传感器完成如下图一样得迷宫挑战呢?同学们可以亲自动手尝试哦!
参考程序

本节课得学习内容到此结束了,对于高难度的迷宫,同学们是不是也找到了简单解决得办法啦!基于这节课所学知识,同学们还可发挥自己的创意,设计更有趣实用的程序!有好想法的同学可以随时跟老师交流!也可以随时在下面留言哦~
各大公立校、托管和教培机构,若想获得更详细课程方案可以在下方联系我们。教案、课件和大量视频素材都已齐备!让我们一起努力培养未来时代的科创家吧!
CooCoo智能编程机器人课程概况
样课动漫课件部分展示
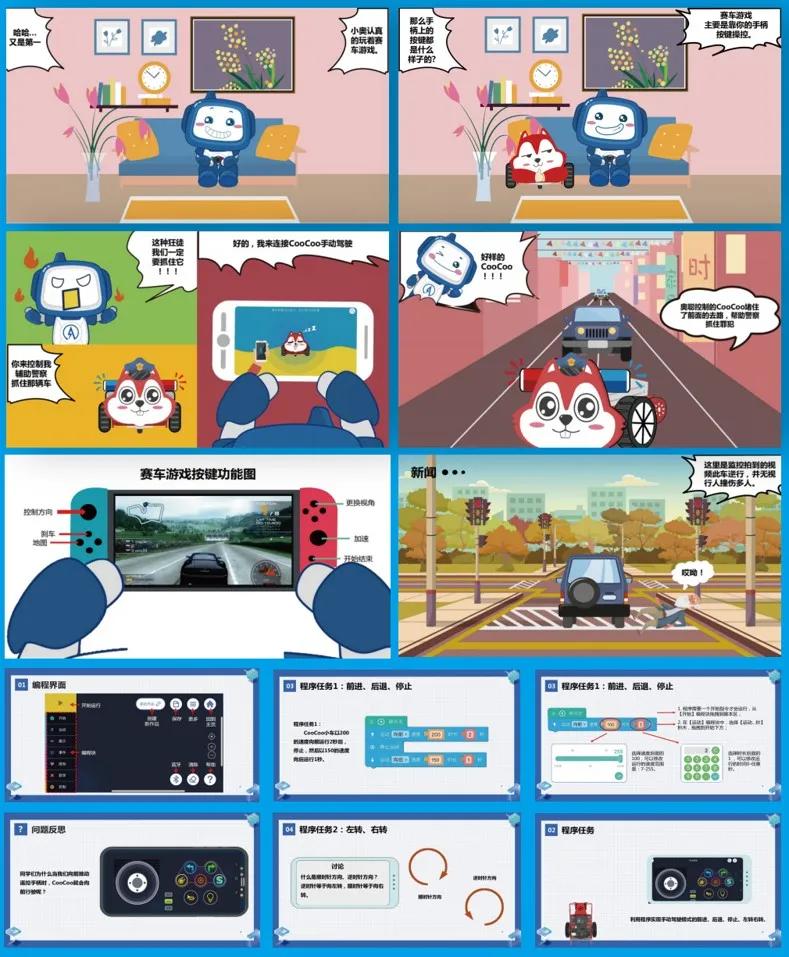
样课教案部分展示
学生用书教材展示

想要索取教育整体解决方案
可直接电话或扫码咨询
400-619-0998转3
近期新闻
热门新闻

奥松智能微信










