
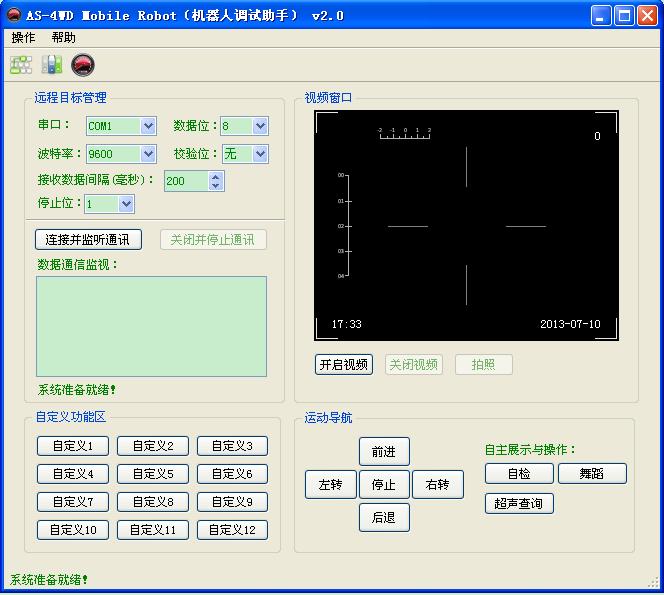
使用 Arduino 控制器的一定用过它的串口通信功能吧?比如当 Arduino 收到字符“A”,然后回传一个“Hello”,这样的功能,实现串口通信的方法很多,你可以使用专门的串口助手软件,也可以使用 Arduino IDE 自带的串口监视器,来实现电脑和控制器的通信,但是如果当您用 Arduino 控制器来控制一个小车,需要前后左右运动,或者在小车上再加上其他的传感器,需要检测传感器数值的时候,串口助手和 Arduino IDE 自带的串口监视器就显得很不方便了,那么如何解决串口字符控制小车不方便这个问题呢?今天介绍给大家的软件,就可以为您解除困扰,它就是由奥松机器人开发的4WD 机器人调试助手!我们先来整体看一下它的操作界面:
最常用的设置界面:

这是软件最常用的部分,包括了要连接端口的相关设置,要说明以下几点:
1. 串口波特率设置:首先这个波特率要和程序中的设定的波特率相同才能保证通信的正常,Arduino 常用的波特率是:9600;115200;
2. 使用帮助:单击使用帮助,会弹出软件的帮助界面,包含了软件的使用需知,如下图所示,这里详细的说明了软件设置上的注意事项,避免因设置错误而耽误使用。

3.串口号设置:软件没有自动识别的功能,就是当您插上一个串口设备的时候,软件不能自动选择该串口,需要您查询串口号,然后选择再在软件中选择相应的串口。
键值设置界面:
单击键值设置,就会弹出键值设置对话框,如下图所示:

通过运动导航按钮和自定义功能按钮的设置,来改变点击相应按钮时软件输出的字符
其中,运动导航按钮中,“快捷键”对于键盘的相应按键,“命令参数”是该按下该按键时,软件输出的字符
自定义功能按钮中,“按钮名称”是设置软件自定义区域的按钮的名称,“命令参数”是按下该按键时,软件输出的字符
例如:设置快捷键为 A,命令参数为 A,那么当按下软件的前进按钮,或键盘的 A 时,软件发送字符“A”
其他功能部分:
1.超声波测距功能,如果小车连接了超声波传感器进行测距,可以通过超声查询按钮来从串口输出前方障碍物的距离。
2.视频监控:当小车连有摄像头设备时,可以通过软件进行视频监控,只需要点击打开视频监控即可。
通过上面的介绍,相信您对这个机器人调试助手已经有了一些了解,关于它的更多功能,比如我们可以给小车加一个蓝牙模块,然后电脑上再加一个蓝牙适配器,这样就实现了小车的无线控制,实际操作起来也是很简单的,只需要添加下面两个模块


好了,这个软件就介绍到这里了,快点儿动手打造属于自己的遥控车吧~
近期新闻
热门新闻

奥松智能微信










