
 Hello !各位小伙伴,我们又见面了!在前几期文章中,我们介绍了机器人通过各种模拟传感器和数字传感器构成的五官来感知外界信息,并通过扩展板将各类传感器连接起来,构成了用于传导信号的神经中枢,那么如何才能让机器人活灵活现地完成众多复杂动作呢?没错,那就要依靠作为机器人心脏的电机驱动板了。电机驱动板是专门为控制电机而设计的。电机驱动板是与电机配套的,使电机正常运转的电路板。被驱动的电机包括4种。第1 种是无刷电机,电机驱动板可以把直流电流转变为3 相电流或4 相电流,使无刷电机得到旋转磁场而转动,可以说无刷电机离开电机驱动板是无法工作的;第2 种是小型直流电机(如录音机的主导轴电机),它需要稳定的速度,并且对速度要求极高,其需要的电子装置即为电机驱动板;第3 种是步进电机,电机驱动板可以把电信号转变为脉冲信号,使得步进电机能接收到固定频率的脉冲序列,从而平稳地运动;第4 种是伺服电机,电机驱动板接收来自控制器的控制信号以驱动电机转动,然后电机带动一系列齿轮组减速后传动至输出舵盘。电机驱动板一般作为控制器与电机中间的纽带,通过接收控制器的指令信号,为机器人的每一个关节提供源源不断的能量。然而电机驱动板的驱动能力也各不相同,就像不同的人力量大小并不相同。一块砖头对于一个小学生来说搬起来可能很费力,但是对于一个成年人来说搬起来还是很容易的。各种驱动能力的电机驱动板满足了机器人的个性化需求。通过以上对电机驱动板的简单介绍,小伙伴们一定很疑惑:电机驱动板是如何在机器人身上工作的呢?它们都有哪些应用场合呢?下面我们就以电机驱动板驱动的电机类型为线索,分门别类地展开讲解。相信在讲述完下面的电机驱动板之后,你就可以给自己的机器人选择合适的驱动板了,也许还能给机器人注入更多的DIY 灵感哦!
Hello !各位小伙伴,我们又见面了!在前几期文章中,我们介绍了机器人通过各种模拟传感器和数字传感器构成的五官来感知外界信息,并通过扩展板将各类传感器连接起来,构成了用于传导信号的神经中枢,那么如何才能让机器人活灵活现地完成众多复杂动作呢?没错,那就要依靠作为机器人心脏的电机驱动板了。电机驱动板是专门为控制电机而设计的。电机驱动板是与电机配套的,使电机正常运转的电路板。被驱动的电机包括4种。第1 种是无刷电机,电机驱动板可以把直流电流转变为3 相电流或4 相电流,使无刷电机得到旋转磁场而转动,可以说无刷电机离开电机驱动板是无法工作的;第2 种是小型直流电机(如录音机的主导轴电机),它需要稳定的速度,并且对速度要求极高,其需要的电子装置即为电机驱动板;第3 种是步进电机,电机驱动板可以把电信号转变为脉冲信号,使得步进电机能接收到固定频率的脉冲序列,从而平稳地运动;第4 种是伺服电机,电机驱动板接收来自控制器的控制信号以驱动电机转动,然后电机带动一系列齿轮组减速后传动至输出舵盘。电机驱动板一般作为控制器与电机中间的纽带,通过接收控制器的指令信号,为机器人的每一个关节提供源源不断的能量。然而电机驱动板的驱动能力也各不相同,就像不同的人力量大小并不相同。一块砖头对于一个小学生来说搬起来可能很费力,但是对于一个成年人来说搬起来还是很容易的。各种驱动能力的电机驱动板满足了机器人的个性化需求。通过以上对电机驱动板的简单介绍,小伙伴们一定很疑惑:电机驱动板是如何在机器人身上工作的呢?它们都有哪些应用场合呢?下面我们就以电机驱动板驱动的电机类型为线索,分门别类地展开讲解。相信在讲述完下面的电机驱动板之后,你就可以给自己的机器人选择合适的驱动板了,也许还能给机器人注入更多的DIY 灵感哦!
直流电机驱动板是最为常用的电机驱动板。它需要经过直流电机驱动电路对直流电机进行调速和控制,驱动电路实际上就是一个功率放大器。而直流电机驱动板就像人类的心脏,将血液源源不断地送往身体各个部位,驱动板则是将经过放大的电流送到机器人身体的各个部位,给机器人提供充足的动力。下面我们就来看看都有哪些常用的直流电机驱动板。
1. 双H桥直流电机驱动板
双H 桥直流电机驱动板的主芯片是L298N,众所周知,L298N 是典型双H 桥直流电机驱动芯片,可用于驱动直流电机或双极性步进电机。由于使用了L298N 芯片,所以它具有体积小、重量轻、驱动能力强等特点,其中峰值电流可达到2A,峰值电压可达到46V;而且续流二极管可防止电机线圈在断电时产生的反向电动势损坏芯片。虽然芯片过热时具有自动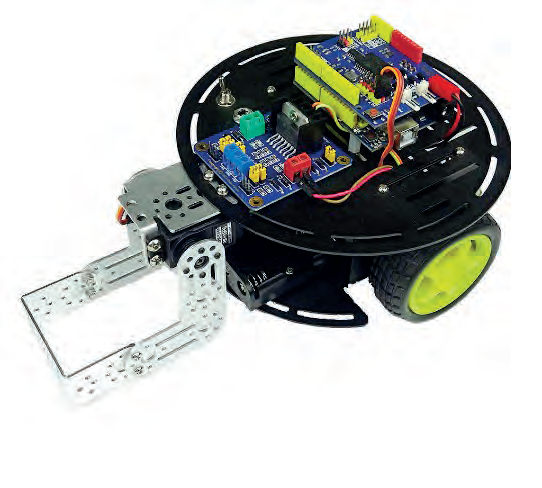

2. StarDuino控制器
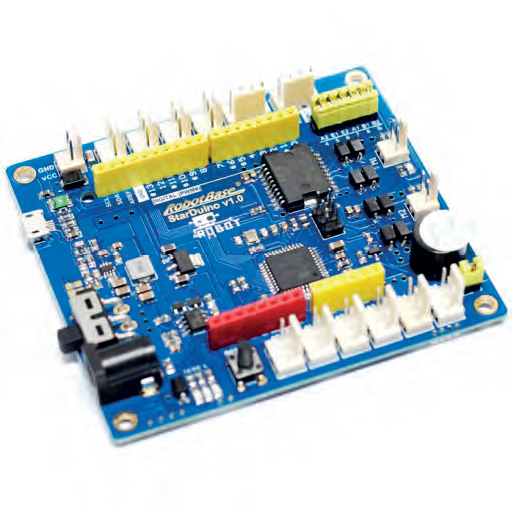
StarDuino 控制器是兼容Arduino 的多功能实用控制器,它由ATmega32u4 微控制器设计而成,有20 个数字输入/ 输出引脚,同时集成了L298N 驱动电路,可以驱动双路直流电机,还可以同时驱动四路舵机。StarDuino 控制器在驱动电机的同时还能够进行蓝牙端的通信。图4 所示就是一款基于StarDuino 控制器的全向移动机器人,它可以通过蓝牙控制并驱动相应电机使机器人快速移动。


 3. 多模式直流电机驱动板
3. 多模式直流电机驱动板
多模式直流电机驱动板能分别为两个直流电机提供最多10A 的电流,甚至可以在几秒内达到峰值电流15A。它还具有过量电流和过量热量保护功能,因此不用担心断电或连接电机数量过多而烧坏驱动器的情况。它的最大优势在于具有模拟电压、无线控制、串行和封包化串行共4 种操作模式,并使用跳线帽设定。多模式直流电机驱动板还可以让电池利用反向电动势进行充电。如图所示的礼品抛射机器人就是采用该驱动板的无线控制模式,可以在无控制器的情况下进行操作。
4. 树莓派直流电机驱动板
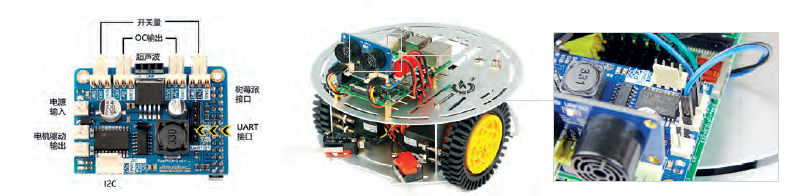
众所周知,树莓派的功能十分强大,但是它自身无法驱动电机,而这正是图中驱动板的作用。树莓派电机驱动板可驱动两路直流电机,兼容树莓派2 代和3 代的板型。它具有丰富的接口,如能输出较大功率的对外开漏输出接口OC1 和OC2,开关量模块的SW1 和SW2 接口等。图8 所示是一款基于树莓派电机驱动板的多功能避障机器人。通过插接在驱动板上的超声波模块和碰撞开关可以达到实时侦测前方障碍物的目的。
5 .RoboClaw直流电机驱动板
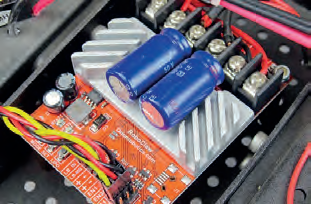
Orion Robotics 的RoboClaw是双通道的同步可再生电机控制器。它的输入电压在6~34V,可驱动有刷直流电机在30A 电流的条件下连续运转,甚至允许两倍的峰值电流通过。RoboClaw 具有双正交解码能力,内建的PID 程序能够实现闭环控制、速度保持,甚至可以读取负载变化、编码器数值与速度信息。RoboClaw 还可以支持多种控制模式:适合嵌入式系统或PC 的TTL 串行通信;玩具模型的ESC 遥控控制;模拟电位计和模拟操作杆。如图所示的6WD 无线越野侦测机器人,搭配RoboClaw 驱动板后动力强劲,在同时驱动6 个电机的情况下也能稳定输出,因此它使小车具有超强越野能力。

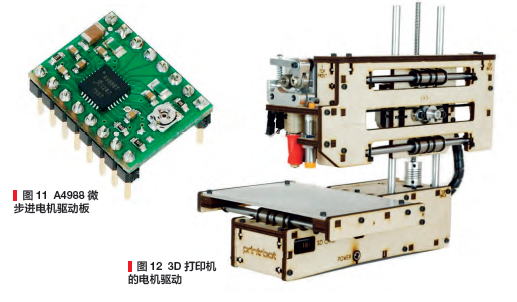
步进电机驱动板是将控制器传送过来的脉冲信号转化为步进电机角位移的装置。它常用于需要精确控制的场合,例如3D打印机、雕刻机或者机械手臂,下面我们就来介绍几款常用的步进电机驱动板。
1. A4988微步进电机驱动板,A4988 驱动板(见图11)的优势在于可调节限制电流(可以通过一个电位计设定最大电流输出,使步进电机工作电压高于额定电压,实现更高的步进速率),提供过流和过热保护以及5 种不同的细分(整步、1/2 细分、1/4 细分、1/8 细分以及1/16 细分)。它的工作电压为8~35V,在没有散热片或是空气流动时,每相可提供约1A 的电流,而在有足够的冷却的条件下,每相可提供约2A 的电流。它常用于3D 打印机的电机驱动控制。
2. Big Easy Driver步进电机驱动板
Big Easy Driver 步进电机驱动器最大可驱动每相2A 的双极步进电机,默认为16 微步模式。其峰值电压35V 且板载5V/3.3V 可调节选择端。
舵机驱动板能够处理来自控制器的控制信号,控制舵机转动。舵机带动一系列齿轮组,减速后传动至输出舵盘。下面我们就来看看常用的舵机驱动板。
1. Steven控制器
Steven 控制器是基于Arduino 的mini 控制器, 主控芯片为Atmega32u4。通过外部电源供电(7 ~15V), 数字端口便可驱动舵机工作。Steven 控制器的尺寸较小,因此适用于空间狭小或集成度高的场合。别看Steven 控制器体积小,它可是驱动舵机的小能手。

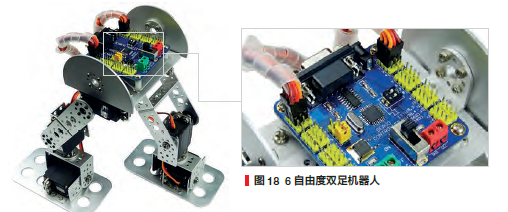
2. 32路舵机控制器
如何驱动更多的舵机工作呢?这就需要32 路舵机控制器了。它可以控制多达32 个舵机协调动作,即控制每一个舵机的位置和速度。你既可以用上位机软件进行控制,也可以添加其他模块脱机工作。32路舵机控制器的体积小、重量轻,常作为类人型机器人、仿生机器人和多自由度机械手的主控制器。现在我们来看看32 路舵机控制器制作的机器人。如图所示的6 自由度双足竞步机器人,顾名思义,它共有6 个舵机。该机器人不仅可以前后步行,还可以原地下蹲、起立或左右转向,甚至可以做前滚翻、后滚翻等特技动作。
无刷电机通常使用电子调速器(简称电调,Electronic Speed Control,ESC)作为驱动板(见图20)。
针对不同的电机,电子调速器分为有刷电调和无刷电调。它常应用于四轴飞行器。
本文讲解了机器人的心脏——电机驱动板,以及它的分类和应用,希望该介绍能让你在DIY机器人作品时有更多的创意。结合之前讲解的机器人五官和中枢神经系统,相信大家对制作机器人已经做好了充足的准备。在下一期中,我们要讲解机器人表达自己语言和心情的显示类模块。让机器人和我们互动起来吧!

----------------------------------------------------------------------------------------------------------------
奥松机器人官网:www.robotbase.cn
微信号:搜索公众号“奥松机器人”
QQ群: 271230889(讨论,解惑)
微博:@奥松机器人基地
----------------------------------------------------------------------------------------------------------------
温馨提示:予人玫瑰,手留余香;如果你喜欢这篇文章,不妨转发推荐给你身边的朋友!
近期新闻
热门新闻

奥松智能微信










